Public and open-source research projects I’ve led or contributed to. See References for papers and books I’m reading.
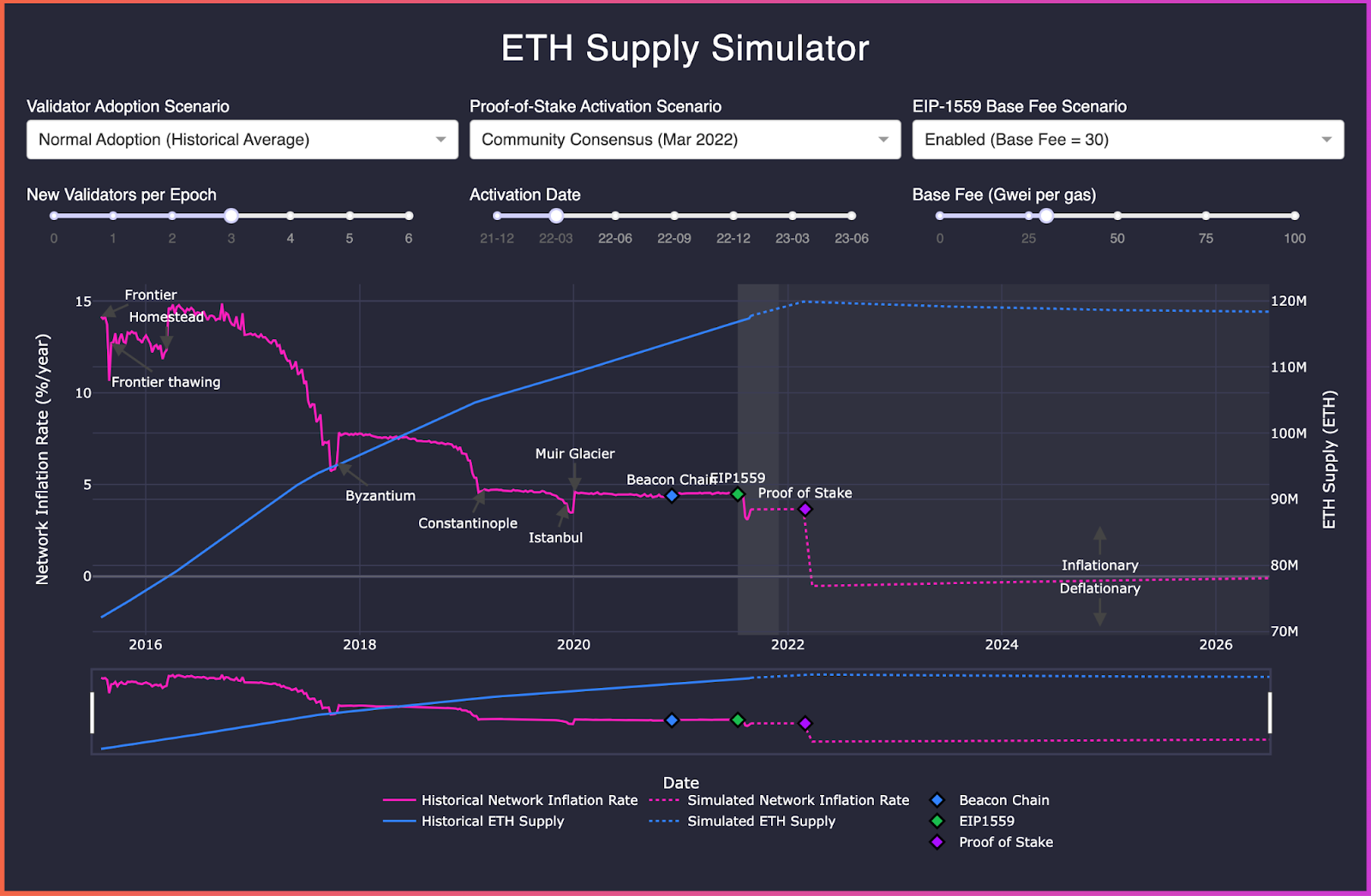
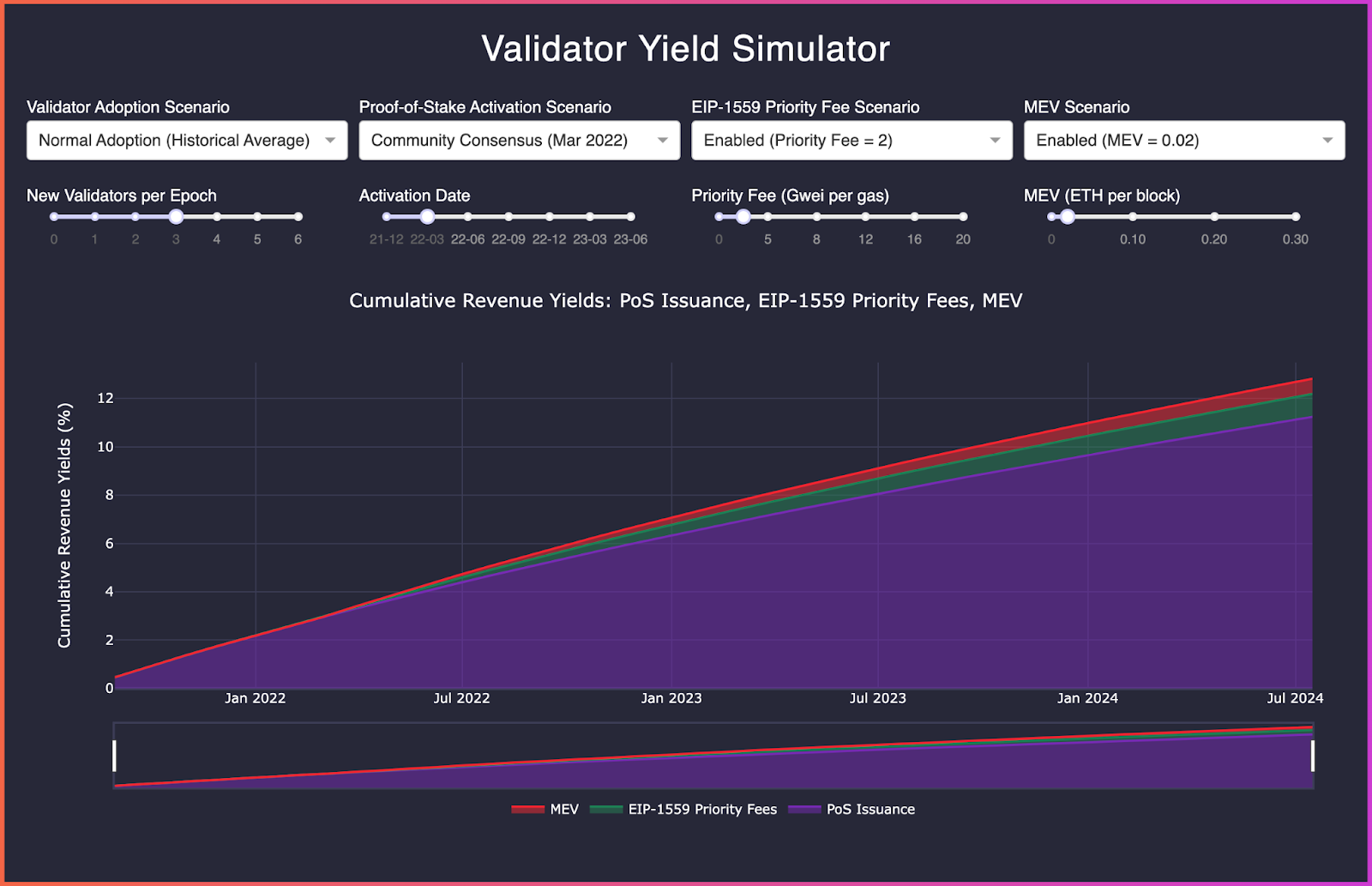
CADLabs Ethereum Economic Model
See https://ethereum-economic-model.cadlabs.org/
ETHModel.io Frontend
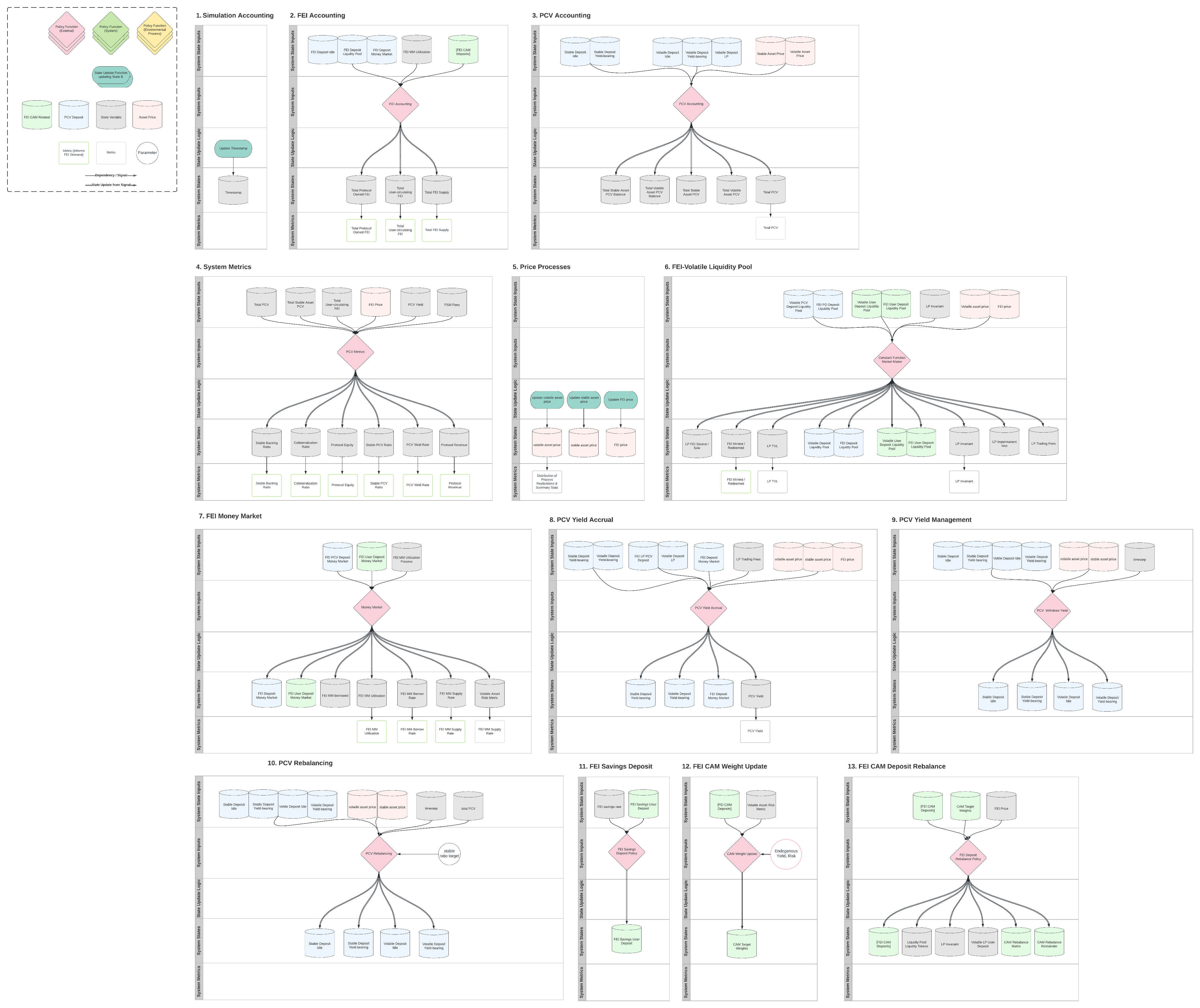
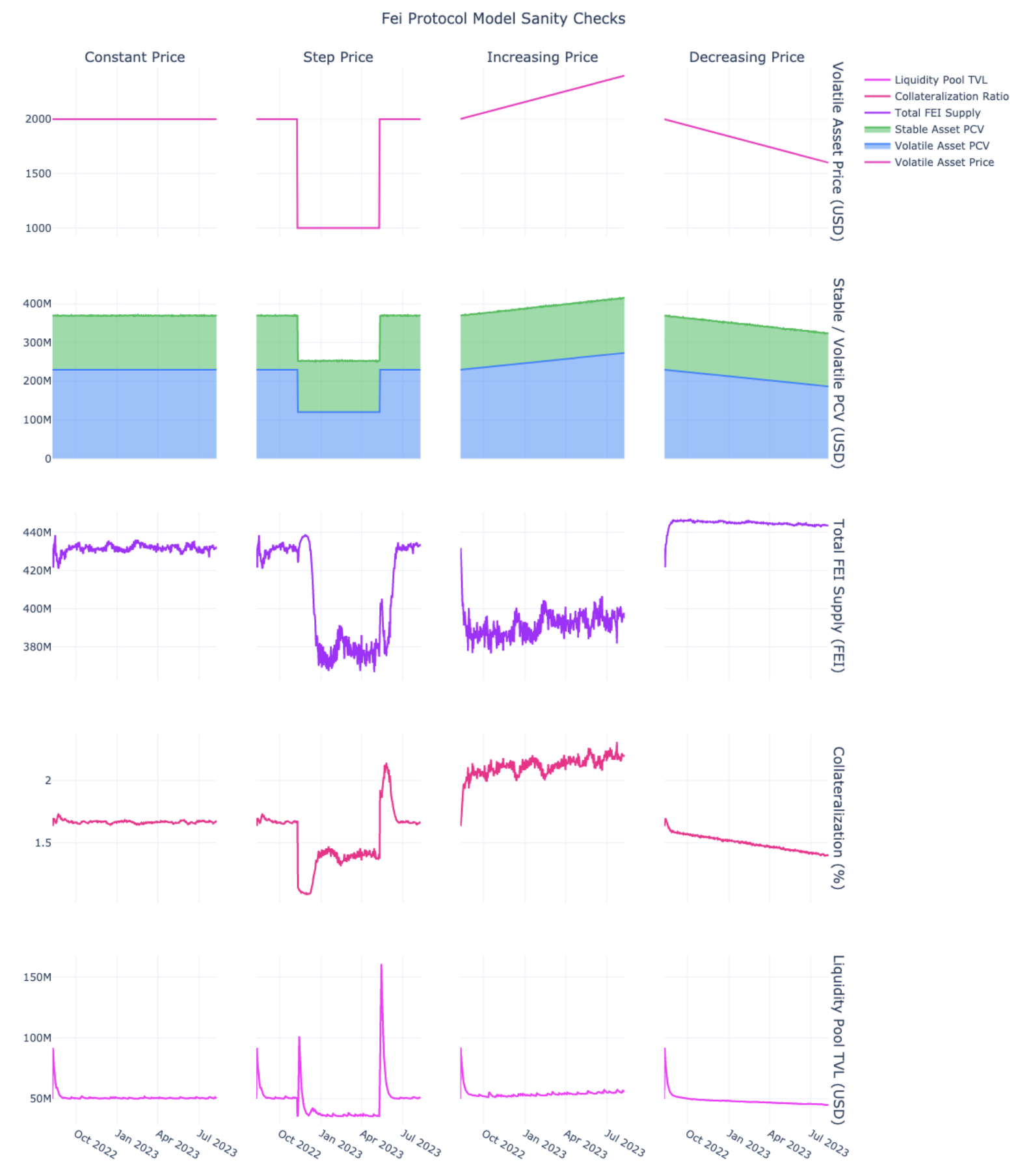
Fei Protocol Model
See https://github.com/CADLabs/fei-protocol-model
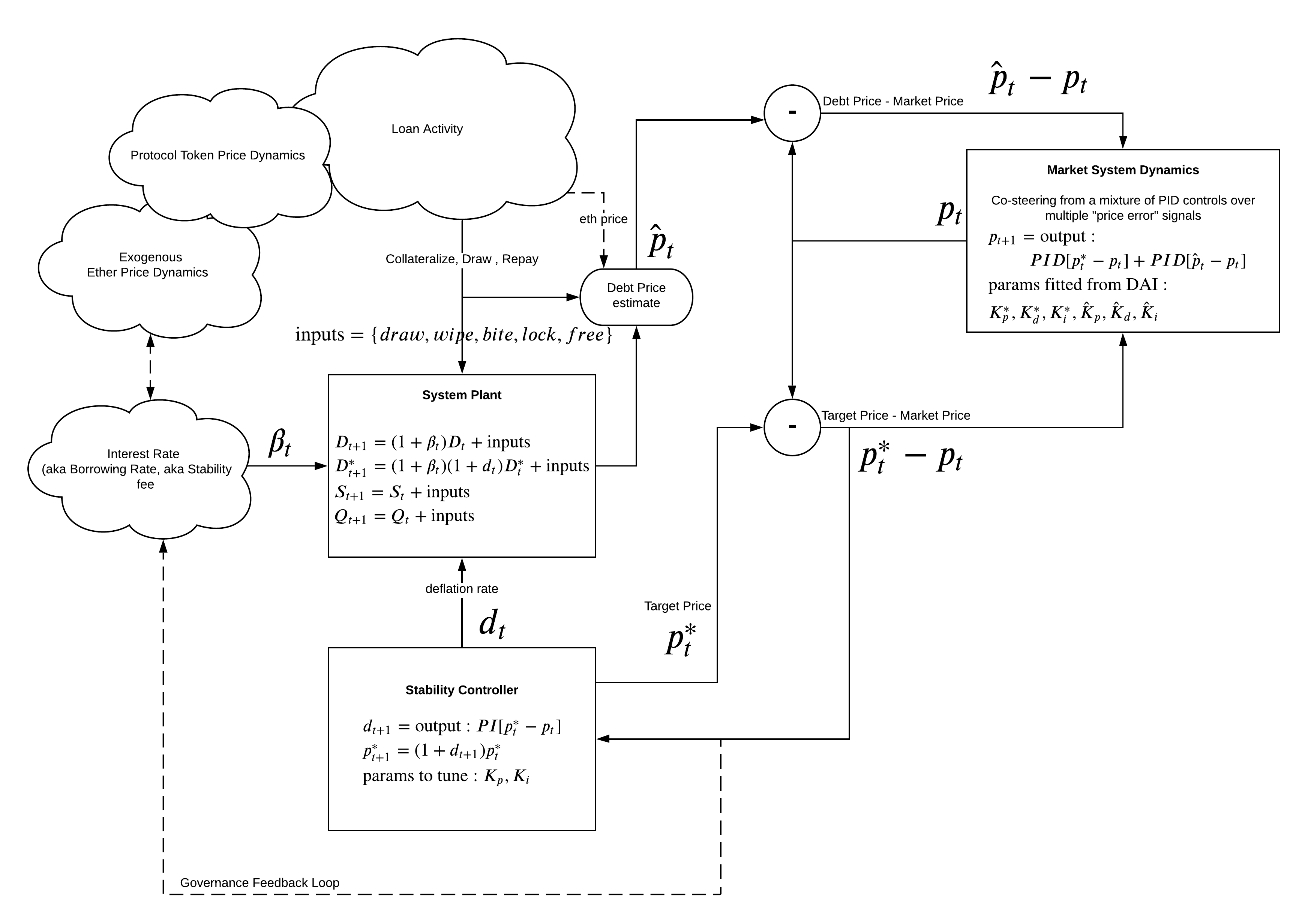
Reflexer Algorithmic, Floating Peg Stablecoin Model
See https://github.com/BlockScience/reflexer
Rai is a decentralized protocol that reacts to market forces to modify the value of a collateralized asset. Rai allows anyone to leverage crypto assets to issue a “reflex bond” that follows the price of its underlying collateral in a less volatile way. The stated goal is to stabilize the secondary market price for RAI debt, using the redemption price as a stabilizer. The benefits of such stabilization is a reduction in the volatility of the market price, thereby increasing predictability, while at the same time creating a flexible response instrument that can counteract or dampen unanticipated market shocks (such as liquidity cascades arising outside of the system).
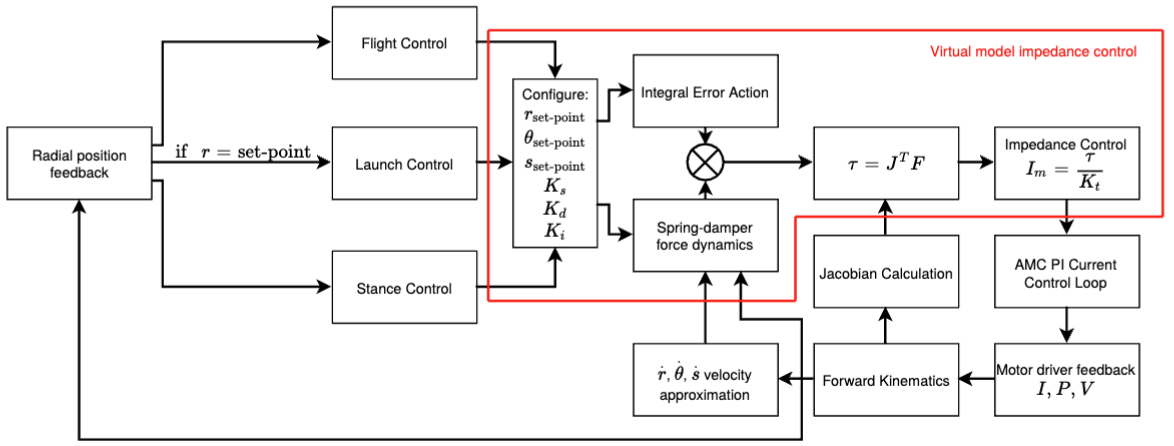
Mechatronics Engineering Thesis
Development of a virtual compliance control system for a robotic leg: thesis, video.
Abstract
A vertically constrained direct drive robotic leg platform was modelled, simulated, designed, built, and tested in order to better understand rapid acceleration control.
The research was performed to investigate the following questions: Is a virtual model a suitable replacement for accurate dynamic modelling in complex robotic topologies? Can high-fidelity force control be effectively implemented without using force feedback? Is a virtual compliance control system effective in handling high-speed impacts and executing rapid acceleration manoeuvres?
The dynamic model of the robot is complex, instead a virtual model uses simulations of components placed on the body of the robot to generate the desired end effector force response. The end effector was virtually modelled in the polar coordinate system as a radial and torsional series spring-damper. The desired virtual model motor torques were generated using the Jacobian kinematic mapping. Proprioceptive force control was possible due to the transparent coupling between the direct drive actuator and end effector.
An iterative hardware and software design process was used to enable effective robotic testing - both an embedded communication and control system, and a GUI, were developed for the platform.
Experiments were performed in virtual model spring-damping, impact absorption, trajectory tracking, force control, and current control. Jump tests were performed investigating robustness, repeatability, and rapid acceleration control. Force control and virtual model fidelity were verified by critically analysing both theoretical simulated responses and practical data.
The robot generated an energy of 3.9 J/kg with a maximum hopping height of 0.4 m, comparing well to the current state of the art. Robust hopping control was achieved with an 8.57% mean time shift and a negligible mean peak force deviation over 7 consecutive jumps.
A robust robotic platform was successfully developed that enabled high-fidelity force control using a virtual compliance model. The research contributed a platform and control framework that can be effectively used in future rapid acceleration research in the UCT Mechatronics Lab.